開発実績
これまで当社で開発した製品、技術の一部をご紹介します。
橋梁維持補修作業用移動足場
当社は常設式橋梁検査車の設計では日本と韓国で最大の実績があり、豊富な経験を蓄積しています。現在では、設計・製造・運用サポートまで当社で行っています。
橋梁点検補修用作業車(昭和62年度・土木学会技術開発賞受賞)




概要
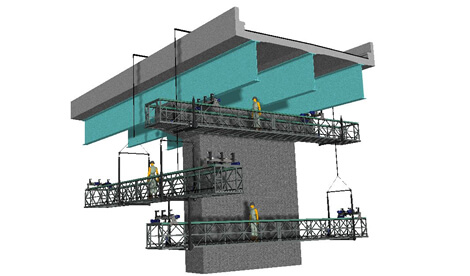
橋梁点検補修用作業車とは、長大橋の点検・塗り替え補修などの維持管理作業を安全・円滑・経済的に行うための常設式移動足場です。
この種の構造物は通常、総重量10~100t超のアルミ合金製ですが、橋梁と同じ年月にわたり過酷な海洋条件に曝されるため、設計・製作には構造強度、機器の信頼性、システムの安全性、耐腐食性、絶縁性などに対して細心の配慮が求められます。
当初、これら設備の製造は、旧来は重工各社が行いましたが、今では精通する技術者が姿を消し、設備の保全にも支障が出ています。当社は30年近くこの分野に継続的に関わり、設計から保守までの知見を保有しています。
設計における留意点
- 有効床面積、接近範囲の最大化
- 機器のコンパクト化、堅牢性
- FEMによる構造設計
- 機器、電気装置の耐食性、耐絶縁性
- シンプルで堅牢なシステム安全性
設備開発実績(2026年現在)
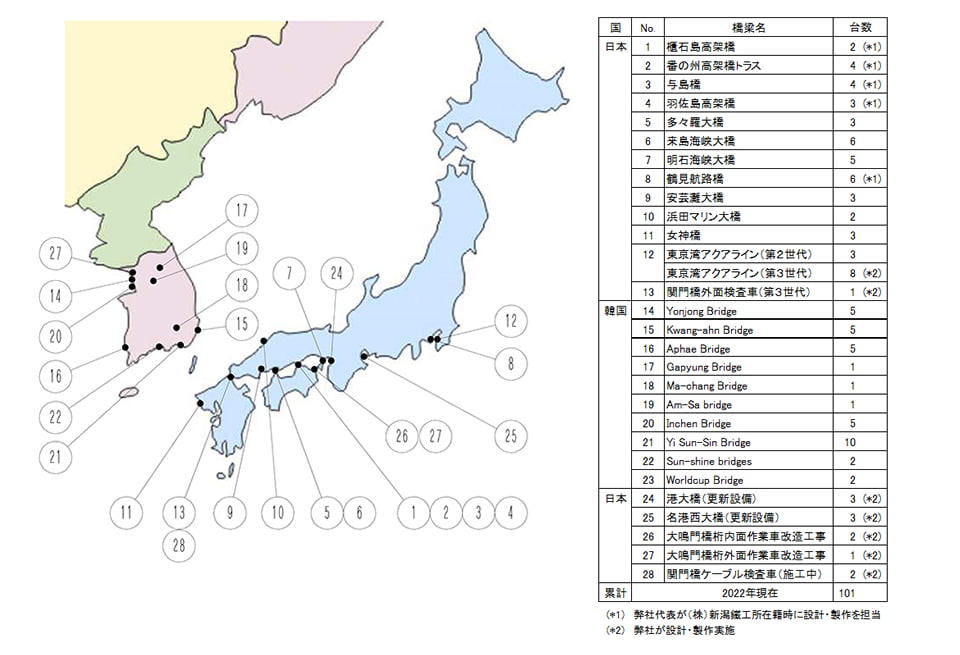
| 国 | No. | 橋梁名 | 台数 | 構造形式 | 備考 |
|---|---|---|---|---|---|
| 日本 | 1 | 櫃石島高架橋 | 2 (*1) | トラス構造コの字型点検車 | 2形式 |
| 2 | 番の州高架橋トラス | 4 (*1) | 多径間対応曲弦トラス橋点検車 | 2形式 | |
| 3 | 与島橋 | 4 (*1) | 多径間対応曲弦トラス橋点検車 | 2形式 | |
| 4 | 羽佐島高架橋 | 3 (*1) | 多径間対応曲弦トラス橋点検車 | 2形式 | |
| 5 | 多々羅大橋 | 3 | プレートガーダー式点検車 | ||
| 6 | 来島海峡大橋 | 6 | プレートガーダー式点検車 | ||
| 7 | 明石海峡大橋 | 5 | トラス構造コの字型点検車 | 2形式 | |
| 8 | 鶴見航路橋 | 6 (*1) | プレートガーダー式点検車 | ||
| 9 | 安芸灘大橋 | 3 | プレートガーダー式点検車 | ||
| 10 | 浜田マリン大橋 | 2 | プレートガーダー式点検車 | ||
| 11 | 女神橋 | 3 | プレートガーダー式点検車 | ||
| 12 | 東京湾アクアライン(第2世代) | 3 | 多径間急勾配対応型下面及び側面点検車 | 2形式 | |
| 東京湾アクアライン(第3世代) | 12 (*2) | 多径間急勾配対応型下面及び側面点検車 | 4形式 | ||
| 13 | 関門橋外面検査車(第3世代) | 2 (*2) | リフター装備プレートガーダー式点検車 | ||
| 韓国 | 14 | Yonjong Bridge | 5 | 多径間対応トラス構造点検車 | 2形式 |
| 15 | Kwang-ahn Bridge | 5 | トラス構造コの字型及び曲弦トラス橋点検車 | 2形式 | |
| 16 | Aphae Bridge | 5 | 多径間対応及び拡縮式点検車 | 2形式 | |
| 17 | Gapyung Bridge | 1 | 多径間対応旋回/昇降式点検車 | ||
| 18 | Ma-chang Bridge | 1 | 超急勾配、多径間対応型点検車 | ||
| 19 | Am-Sa bridge | 1 | 多径間対応拡縮式点検車 | ||
| 20 | Inchen Bridge | 5 | プレートガーダー式点検車 | ||
| 21 | Yi Sun-Sin Bridge | 10 | 多径間対応拡縮/旋回式点検車 | 2形式 | |
| 22 | Sun-shine bridges | 2 | 多径間、レールスパン変化対応型点検車 | ||
| 23 | Worldcup Bridge | 2 | 多径間対応拡縮/旋回式点検車 | ||
| 日本 | 24 | 港大橋(更新設備) | 3 (*2) | 多径間対応リフター/ゴンドラ搭載型点検車 | 2形式 |
| 25 | 名港西大橋(更新設備) | 3 (*2) | プレートガーダー式点検車 | 2形式 | |
| 26 | 大鳴門橋桁内面作業車改造工事 | 2 (*2) | シザース昇降及び2段拡縮型点検車 | 2形式 | |
| 27 | 大鳴門橋桁外面作業車改造工事 | 1 (*2) | リフター3台搭載型に改造 | 2形式 | |
| 28 | 関門橋ケーブル検査車 | 2 (*2) | |||
| 累計 | 2026年現在 | 106 | |||
(*1) 弊社会長が(株)新潟鐵工所在籍時に設計・製作を担当
(*2) 弊社が設計・製作実施
関連開発実績
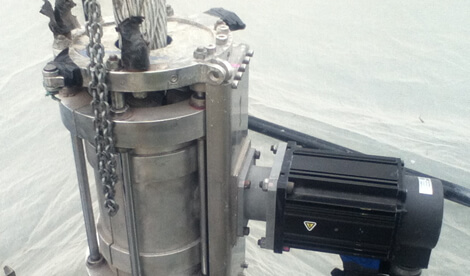
ケーブル検査車
吊り橋主ケーブルに設置し、ケーブルやケーブルバンドなどの点検補修作業を行います。作業車はケーブル上の2本のハンドロープに懸垂支持され、ハンドロープを挟み込むゴム製キャタピラシューにより主ケーブルに沿って移動します。

橋梁維持関連機械
当社はこれまで長大橋向けに数々の新しい技術を開発し、効率的な保全に貢献してきました。
現在、その経験を活かし、膨大量の一般橋梁が抱える課題に取り組んでいます。
吊り橋ハンガーロープ素地調整機械

写真は昇降装置にゴンドラを使用し、素地調整装置2台により2本のケーブルを同時処理する方法としていますが、ご要望によってはゴンドラ以外の昇降手段や1本ケーブルに対応する装置の設計製作も可能です。
概要
吊り橋などのより線ハンガーロープの3種ケレン自動素地調整機械です。従来のディスクサンダーによる2名の人力作業に比べ4~5倍の作業能率です。研磨ブラシがストランドに沿って往復動することにより、錆や劣化塗膜を除去し、粉塵は吸引して回収します。約1m/minの作業速度があり、1往復で所定の均一な品質が得られます。
 処置前
処置前 処置後
処置後磁石車輪応用技術
当社の特許技術である永久磁石内蔵吸着車輪は、これまでさまざまな用途で使用されています
今後は本技術の更なる応用展開を図る予定です。
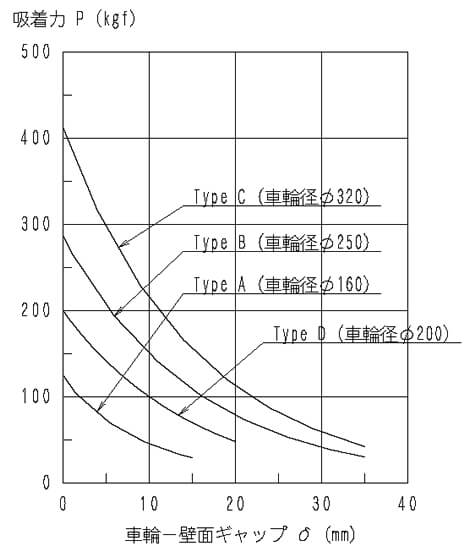
磁石車輪とは
磁石車輪はゴムライニングされた車輪の内部に強力なネオジウム永久磁石を内蔵しています。車輪の表面と磁石との空隙を大きくとっているため、一般の磁石車輪と違い、車輪と壁面に多少のギャップがあっても急激な吸着力の減少はありません。このため、添接ボルト上の移動や大きな段差乗り越えが可能となり、用途としては作業用ロボットの吸着移動手段として好適です。また、車輪の内部に走行用のモータと駆動機構を組み込むことも可能です。

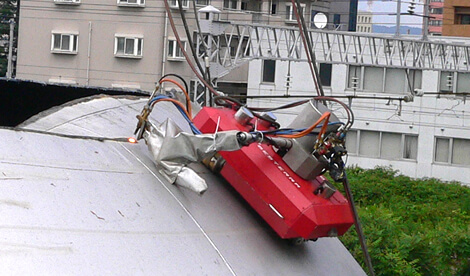
鋼製壁面作業ロボット

概要
吊り橋の主塔や球形タンク、円筒形タンク等、鋼製壁面を磁石車輪により移動して作業するためのロボットです。全輪の操舵機構により、自由な姿勢で上昇・下降・横行・斜行、つまり全方位に移動します。カメラやアーム、切断用ガスバーナー、飛散防止型のケレン・塗装システム等、作業内容によって必要となる機能を搭載することができます。
壁面ロボットの仕様
| 重量 | 85kg(本体65kg+作業装置20kg) |
|---|---|
| 移動速度 | 0~10m/min |
| 吸着力 | 平坦部において600kgf /全3輪 |
※上記仕様は壁面ロボットの1例となります。
活用事例
本州四国連絡高速道路株式会社様のサイトにて、実際の事例をご覧いただけます。
長大橋の保全技術(維持管理設備)
関連開発実績
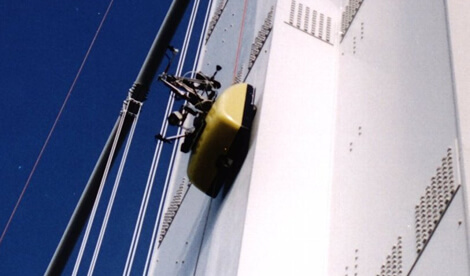
磁石車輪吸着式主塔点検補修作業ロボット
人が容易に接近できない主塔壁面の点検・補修用に開発しました。ロボットの運転は制御・操作装置により無線カメラ画像を見ながらの遠隔操作が可能です。